The model joint tool is used for creating ragdolls.
For now this is the only functionality of this tool.

Joint tool, for now, is specifically designed for creating ragdolls and raycast geometry on skinned models,
do not use it on other kind of model
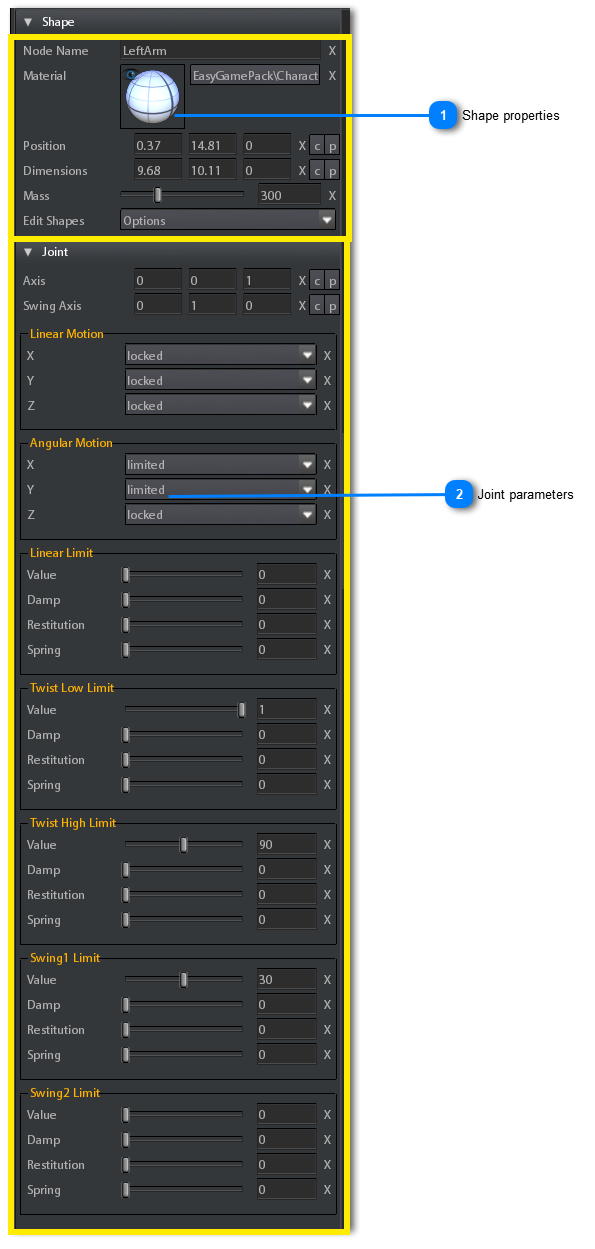
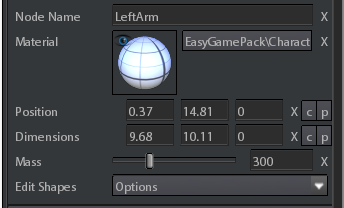
 Shape propertiesThe only physics shape that can be created and edited, for now, is the capsule.
This section is designed for creating and manipulating capsules.
-
Node name: Name of the node ino which create the physics capsule.
-
Material: The material of physics capsule.
-
Postion: Local position of the capsule .
-
Dimensions: Dimensions of the capsule.
-
Mass: Mass of the capsule, used when simulating the ragdoll.
-
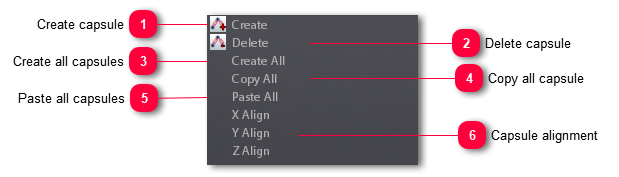
Edit Shapes: A list of operations that can be performed on capulses :
 Create capsuleCreate a capule into the selected node
| |
 Delete capsuleDelete the current selected capsule
| |
 Create all capsulesCreate a capsule for all nodes
| |
 Copy all capsuleCopy capsules of all nodes of the model into the clipboard
| |
 Paste all capsulesPaste capsules of all nodes from the clipboard to the nodes of the model.
It checks correspondence between model node names and names stored into the clipboard,
if the names match a capsule is created and its data is copied from the corresponding capsule stored in clipboard.
| |
 Capsule alignmentX Align: the capsule vertical axis is aligned to the X axis of the node.
Y Align: the capsule vertical axis is aligned to the Y axis of the node.
Z Align: the capsule vertical axis is aligned to the Z axis of the node.
| |
Capsules can overlap
|
|
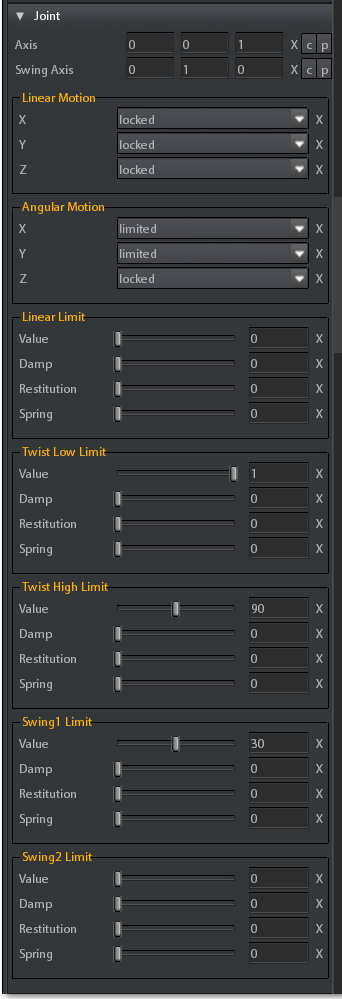
 Joint parametersThese parameters define the behaviour of the physics D6 joint (six-degrees freedom Joint) between selected capsule and the parent node capsule.
Axis: Using this parameter you can decide how the twist axis of the capsule joint must be orietated respect to the axis of the owning node.
The twist axis is the X axis of the joint. It is showed as a pink line.
The following are 3 examples about how this parameter can be set:
-
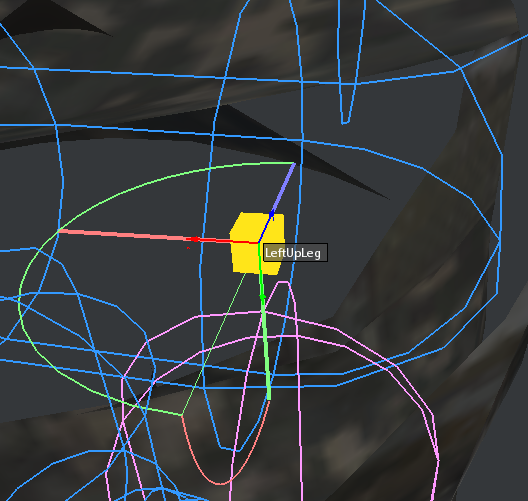
1,0,0 values: the twist axis is orientated along the X axis (the red axis) of the node.
In the following image you can note the pink line is aligned with the red X axis of the node:
-
0,1,0 values: the twist axis is orientated along the Y axis (the green axis) of the node.
In the following image you can note the pink line is aligned with the Green Y axis of the node:
-
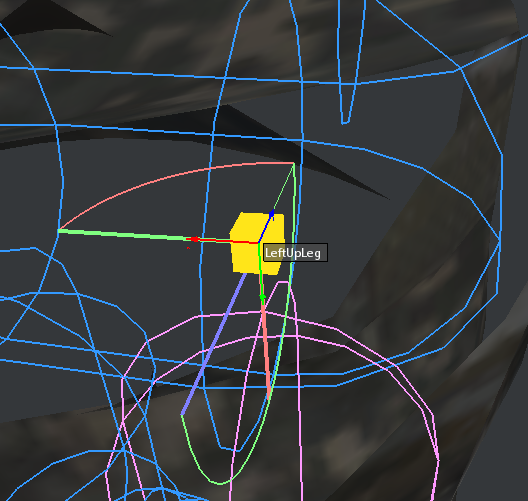
0,0,1 values: the twist axis is orientated along the Z axis (the blue axis) of the node.
In the following image you can note the pink line is aligned with the Blue Z axis of the node:
Swing and Twist axis must be orthonormal, so Axis and Swing axis cannot have the same values
-
Swing Axis:Using this parameter you can decide how the swing axis of the capsule joint must be orietated respect to the axis of the owning node.
The swing axis is the Y axis of the joint. It is showed as a light green line.
The following are 3 examples about how this parameter can be set:
-
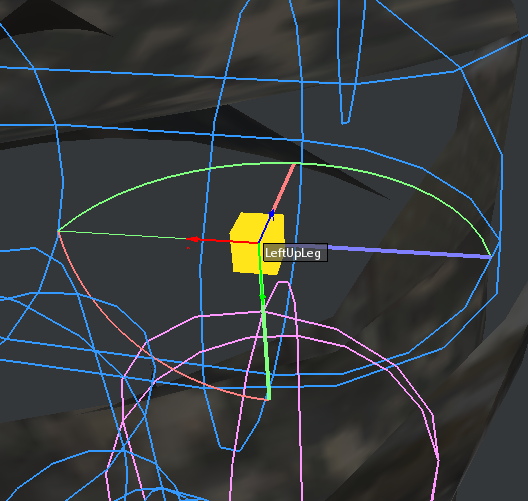
1,0,0 values: the swing axis is orientated along the X axis (the red axis) of the node.
In the following image you can note the light green line is aligned with the red X axis of the node:
-
0,1,0 values: the swing axis is orientated along the Y axis (the green axis) of the node.
In the following image you can note the light green line is aligned with the Green Y axis of the node:
-
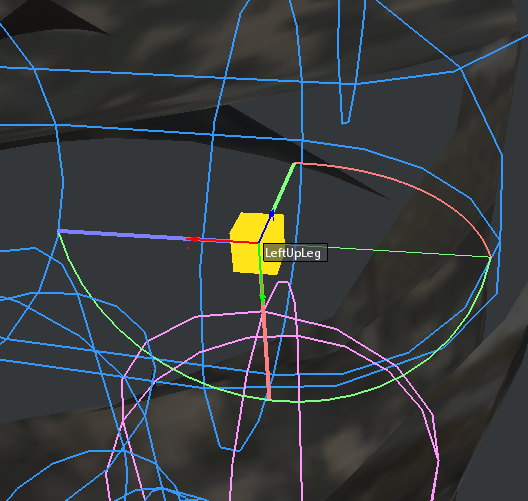
0,0,1 values: the swing axis is orientated along the Z axis (the blue axis) of the node.
In the following image you can note the light green line is aligned with the Blue Z axis of the node:
-
Linear Motion: Sets the type of freedom for the joint translations on Twist (x), swing1 (y) and swing2 (z) axis.
There are 3 level of freedom allowed:
-
locked: the joint is completely locked on specified axis
-
limited: the joint is limited in movement on specified axis. Below it is explained how to set these limits.
-
free: the joint is free to move on the specified axis .
-
Linear Limit: These parameters describe what are limits to the movement of the joint and how the joint must behave when reaching them.
-
Value: The extent of the limit. I.e. the max distance of the joint from the origin along the given axis .
-
Dump: if spring is greater than zero, this is the damping of the limit spring
-
Restitution: Controls the amount of bounce when the joint hits a limit
-
Spring: if greater than zero, the limit is soft, i.e. a spring pulls the joint back to the limit
Basing on the number of axis limited, the motion constraint can be a single line, a circle or a sphere
The upper limit must be no lower than the lower limit
-
Swing1 Limit: Limit for the Swing1 (y) axis of the joint.
-
Value: The absolute value of the angle of the limit. This means that the joint swing1 angle is limited in range [-value,value].
-
Dump: if spring is greater than zero, this is the damping of the limit spring
-
Restitution: Controls the amount of bounce when the joint hits a limit
-
Spring: if greater than zero, the limit is soft, i.e. a spring pulls the joint back to the limit
-
Swing2 Limit: Limit for the Swing2 (z) axis of the joint.
-
Value: The absolute value of the angle of the limit. This means that the joint swing2 angle is limited in range [-value,value].
-
Dump: if spring is greater than zero, this is the damping of the limit spring
-
Restitution: Controls the amount of bounce when the joint hits a limit
-
Spring: if greater than zero, the limit is soft, i.e. a spring pulls the joint back to the limit
|
|